There's the mechanical aspect, i.e. how the robot moves. The electrical aspect, i.e. how the robot is powered. And the software and control aspect, which these days often involves Artificial Intelligence (AI).
“When there are huge advancements in one area, like there have been recently with AI, that propels the other two fields to innovate,” says Balestrini. “With new surgical robotics that are being developed, for example, they’re pushing the boundaries of mechanical design with each iteration because they need to achieve very precise motion.”
Maybe you want to build a floating robot like Victoria-based Open Ocean Robotics which uses robotic solar-powered boats to collect ocean data in the hopes of better understanding, among other things, how the climate crisis is impacting our oceans.
Or, maybe you want to build an AI-powered robotic system that specifically target weeds with lasers instead of herbicides to maintain the nutrient integrity of the soil on a farm, like Carbon Robotics.
Or, maybe you want to design a robot that could sort different types of plastics at a recycling plant or build an electric vehicle at an automotive plant, an assembly line type of environment.
"Often you'll want to make a robot that will do one specific task, as opposed to creating five robots that can do five tasks, especially if they will only be doing one at any given time," Balestrini says.
But if you wanted to build a robot that can do almost anything a human can do, Balestrini says you’d approach it differently because it requires much more dexterity and versatility. For a robotics competition, Balestrini and his team are designing and building a robot that can help with common household tasks, like offering drinks to guests and picking up items off the floor.
“Someone can ask the robot ‘Can you take the trash out?’ and the robot has to understand that request, be able to figure out where the trash is, where it should go and then actually take it there,” says Balestrini.
So how does that robot learn what to do and how to do it?
“You simulate it in a virtual space,” says Balestrini. “If you’ve programmed it right and got your calculations right, it should be pretty similar to reality. At which point you can either control it directly to test it, or try to teach it how to move through reinforcement learning
.”
1
2
3
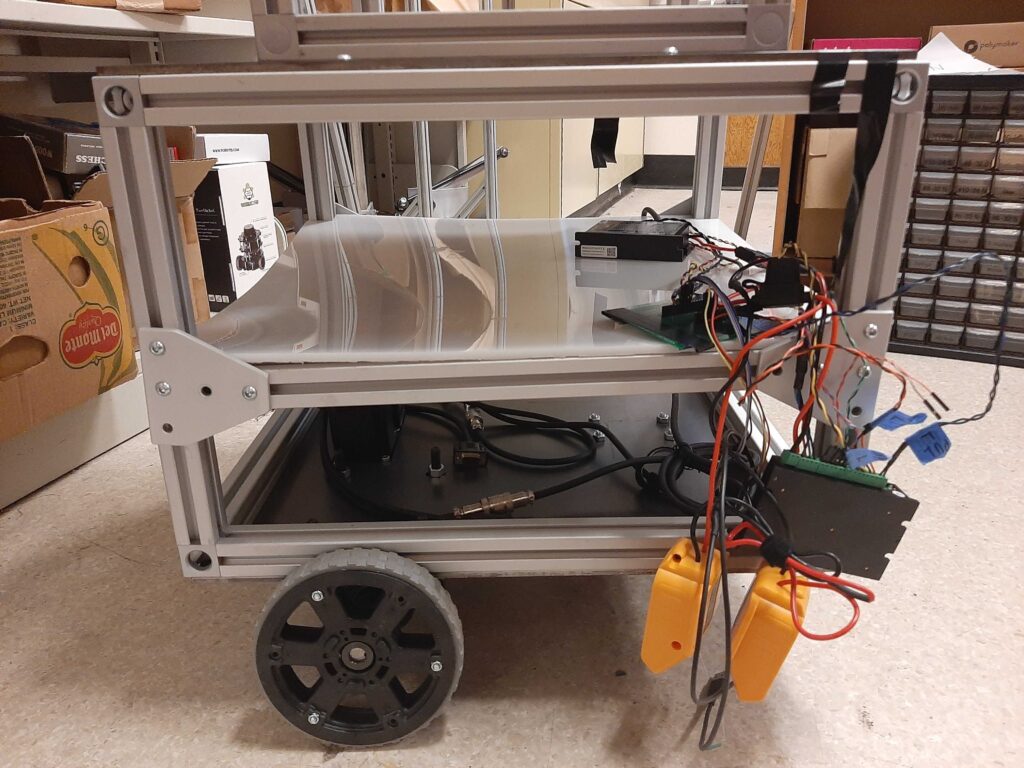
A robot's drivetrain
Drivetrains are the "legs" of many robots, and, as such, support the rest of the robot. A lot of consideration must be given to the weight of other components and the types of motion they will undergo when designing the drivetrain, or it may not be strong enough.
The robot's movement is facilitated by its drivetrain motors; this one specifically employs a stepper-motor chosen for its emphasis on accuracy and power over speed. This choice enables the precise motion of a larger robot, ensuring controlled and deliberate maneuvers.
The drivetrain software functions as the command centre directing the robot's movement. Employing a Robot Operating System (ROS) based navigation stack, the system prioritizes accuracy and dependable performance, facilitating the robot's ability to perceive its surroundings, understand its position, and make intelligent decisions to navigate autonomously.
The virtual robot may take one step and then fall. And then another step before it falls again. But it will learn as it goes until eventually you’re able to transfer its knowledge from a virtual simulation into the actual hardware.
Because, he says, a robot doesn't have thoughts until you give it thoughts (for now). And the robotic body is just a chassis until you give it instructions; then it knows how to move or, at least, try.
Learning through a simulation isn’t flawless, Balestrini says, but it gives the robot a starting point.
“So you don’t have to watch your state-of-the-art real-world robot fall 200 times,” he says.
Then ideally you’ll end up with a robot that can help take out the trash. Or better yet; the recycling.
Curious for more science behind the technology of climate change?
Explore solutions for regenerating our planet on Change Reaction.